6. b-cap slave move
6.1. b-cap Slave Move とは
b-capプロトコルを使用し、ロボットに短い時間周期で位置・姿勢データを送信することで、ロボットを制御する機能です。
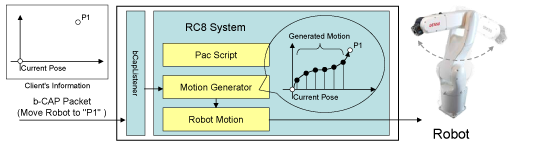
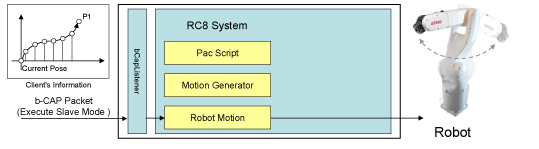
通常のMoveコマンドは目標位置を指定し、ロボットの移動経路(軌跡)はロボットコントローラが計算します(PTP,CP,Move C,Move S)。 しかし、Slave Moveはその移動経路を逐次PCから送信することで移動経路を自在に操作可能です。逆に、速度、加速度まで考慮した目標位置・姿勢データを送信する必要があります。
6.2. b-cap Slave Move の使用条件
8ms間隔でデータを送信する必要がある。(バッファありのモード等あり) 送信するデータは速度、加速度まで考慮されたデータである必要がある 無料ライセンスをRC8へ入れる必要がある。
Move:
b-cap slave move:
6.3. b-cap Slave mode
要求される応答速度に応じて、slave modeを変更することでMAX8msecでの軌道の変更が可能になります。
モード |
パラメータ |
バッファ数 |
バッファの空き待ち |
備考 |
|---|---|---|---|---|
モード 0
同期・待機なし
(RC7 該当なし)
|
0x0** |
3
(バッファリングデータは必ず使用)
|
無 |
クライアントから送信されたメッセージをバッファにキューイングします.
バッファの状態に応じたリターンコードを即時に返します.
|
モード 1
非同期
(RC7 の非同期に対応)
|
0x1** |
1
(バッファリング時,データ上書き)
|
無 |
クライアントから送信されたメッセージで
バッファを上書きし続けます.
|
モード 2
同期・待機あり
(RC7 同期に相当)
|
0x2** |
3
(バッファリングデータは必ず使用)
(RC7 はバッファ数は1)
|
有 |
クライアントから送信されたメッセージをバッファにキューイングします.
バッファに空きができるまでリターンコードを返しません.
|
バッファアンダーフロー時(指令値が空になる)の挙動はモード毎に異なります。
スレーブモード |
ロボット動作状態 |
サーバ挙動 |
備考 |
|---|---|---|---|
モード0 |
ロボット動作中 |
エラーを発生する
指令値生成遅延(0x84201482)
|
スレーブモード解除 |
モード0 |
ロボット停止 |
エラーを発生しない |
スレーブモード維持 |
モード1 |
ロボット動作中 |
エラーを発生しない |
スレーブモード維持
現在位置停留命令を発行
|
モード1 |
ロボット停止 |
エラーを発生しない |
スレーブモード維持
現在位置停留命令を発行
|
モード2 |
ロボット動作中 |
エラーを発生する
指令値生成遅延(0x84201482)
|
スレーブモード解除 |
モード2 |
ロボット停止 |
エラーを発生しない
|
スレーブモード維持 |