8. シミュレーションについて
b-cap通信を使用したソフトウェアの動作確認をするために,実機へ接続することができます. シミュレーションを使用して,PC上のロボットコントローラシミュレータに接続し,通信確認をすることが可能です. このページではシミュレーションへb-cap通信を使用したアプリケーションでの接続のためのシミュレーション環境構築について説明します.
8.1. 必要なソフトウェア
(WINCAPSⅢ)
ORiN2 SDK (デンソー製品版 以上のライセンス)
VRC
※ 上記のソフトウェアは Windows のみ実行可能です. つまり,ロボットのシミュレーションをする場合, windows PCが必須になります.
8.2. 必要なライセンス
必要なライセンスは2パターンから選択できます。
WINCAPSⅢ + VRC Kernel
VRC Professional
次に、各パターンでどのようなソフトウェア構成になるかを説明します。
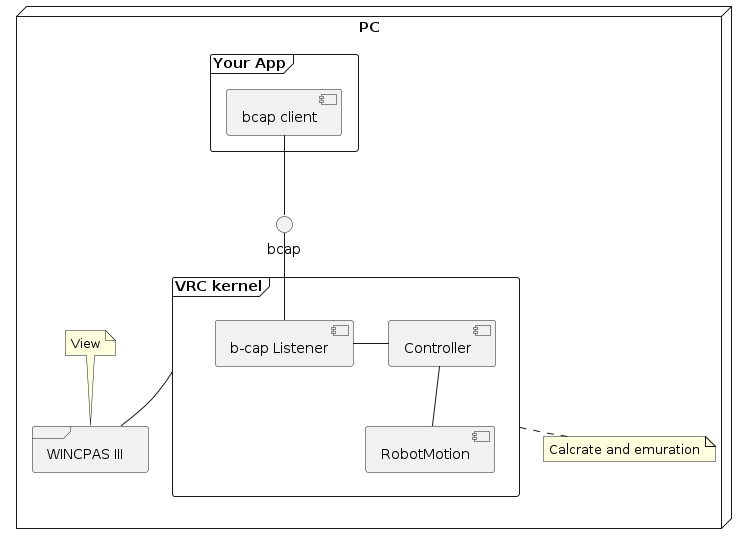
WINCAPSⅢ + VRC Kernel
WINCAPSⅢでロボットやロボットコントローラの状態を確認します. VRC Kernelでロボットやロボットコントローラの状況をエミュレーションします.
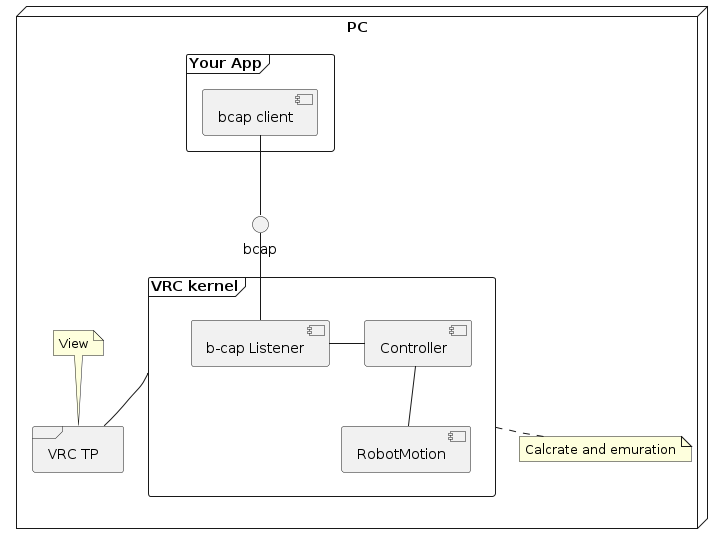
VRC Professional
VRC Professionalを使用することでVRC TP + VRC Kernel でロボットやロボットコントローラの状態を確認します. VRC TP は PC上で仮想のTP(ティーチングペンダント)を表示するソフトウェアです. ロボットやロボットコントローラの状態を表示します. VRC Kernelでロボットやロボットコントローラの状況をエミュレーションします.
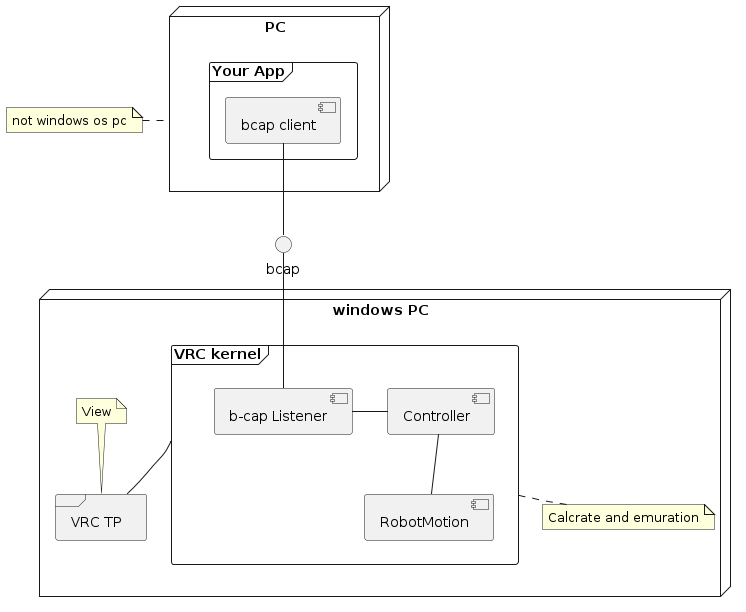
windows 以外のOSのPCを使用する場合,
ロボットシミュレーションソフトウェアはWindowsPCでのみ実行可能です. よって,Windows以外でb-capクライアントアプリケーションを構築,実行する場合, シミュレーションへ接続する場合,別のWindowsPCが必要になります.
8.3. シミュレーション方法の差分
シミュレーション方法によって操作可能な範囲が異なります. 自作アプリケーションを接続する際に 使用する可能性の高い項目を抜粋して,操作可能かどうかの差分を下の表にしています.
項目 |
wincaps+VRC Kernel |
VRC Pro |
手動操作 |
[ ] |
[✓] |
プログラム起動 |
[✓] |
[✓] |
モータON |
[✓] |
[✓] |
非常停止 |
[ ] |
[✓] |
モード切り替え |
[ ] |
[✓] |
ロボットプロジェクトデータ新規作成 |
[✓] |
[ ] |
8.4. 準備
wincaps + VRC Kernel , VRC Professional で操作方法が異なります.
8.4.1. 共通の設定
VRCソフトウェアに同梱されているドキュメント, VRC_Users_Guide_ja.pdf ないの [3.4.2. ORiN2 インターフェイスを介した通信] の内容を実施します.
bCapService で サービス として登録する.
Windows のコマンドプロンプトを管理者権限で起動する
sc.exe create bCapService binpath= “<パス>¥bCapService”を入力してサービス登録する
bCapConfig でbCAP サービスの初期設定を行う.
bCapConfig.exe を管理者権限で起動する
[File]メニュー-[Import…]を選択し, rc8_bcap_cnf.xml を開く
[File]メニュー-[Save]を実行する. ※bCAP サービスの初期設定は変更しない限り,再度実行する必要はありません
bCapConfig でbCAP サービスの開始する.
bCapConfig.exe を管理者権限で起動する
[Action]メニュー-[Service Start]を実行する.この時, bCapService がbCAP サーバーとして起動される
ロボットシミュレーションにb-capで接続をする場合,必ず,b-cap Serviceが実行していないといけません.
8.4.2. wincaps + VRC Kernel
wincaps + VRC Kernelでシミュレーション環境を動作させる方法
bCapConfig でbCAP サービスの開始します
WINCAPSⅢで任意のプロジェクトデータを開きます。
WINCAPSⅢをシミュレーションモードへ移行します。
作成したb-capクライアントアプリケーションを起動する. 接続,操作を開始します.
注釈
シミュレーションモードについて
8.4.3. VRC Professional
VRC Pro でシミュレーション環境を動作させる方法
ロボットプロジェクトデータ
VRCソフトウェアのインストーラの VRC_V****\SamplePrj 内にロボットのプロジェクトデータが格納されています.
ロボットのプロジェクトデータがない場合,このプロジェクトデータを使用してください.
bCapConfig でbCAP サービスの開始します。
VRC TP を起動します. デフォルトパス
C:\Program Files (x86)\DENSO ROBOTICS\VRC\TP\Bin\TP.exeVRC TPが起動し,ロボットプロジェクトデータを入力する画面が表示される.
VRC TP画面でロボットプロジェクトデータ(例:
VRC_V2200\SamplePrj\VS-050A3-A\VS-050A3-A.WPJ)を選択し,起動する.VRC TP画面が立ち上がる
作成したb-capクライアントアプリケーションを起動する. 接続,操作を開始します.